
更智能的移动,更快速的结果

|
MiR1200 Pallet Jack 是内部托盘运输的革命性产品,能以 1.5 米/秒的速度自动检测、运输和交付重达 1200 公斤的欧盟托盘。其开创性的人工智能感知系统使其与众不同,大大缩短了拾放周期时间,提高了吞吐量。
这款灵活的机器人可连续运行,电池容量可持续换班,并可利用机会无缝充电,从而实现不间断的性能。它能毫不费力地在狭小的空间内导航,优化物流效率,确保及时交付托盘,而无需额外的基础设施。
MiR1200 托盘搬运车完美地融入了从仓库操作到核心生产流程的各种价值流,其设计符合安全标准。它可以安全地绕过人员和其他障碍物,是传统叉车和托盘搬运车的安全替代产品。借助用户友好型软件和 MiR Fleet 的快速扩展,该解决方案的部署和管理非常简单,是精确性、性能和生产率的完美结合。 |
√ 基于人工智能的感知,实现快速、精确、可靠的托盘检测
√ 电池容量大,充电速度快,可全天候工作
√ 设计符合现行安全标准 - ISO3691-4 |
|
托盘检测
MiR1200 Pallet Jack 利用机器学习感知技术检测托盘,能够快速、精确、可靠地识别收缩包装托盘。 |
||
|
安全性
MiR1200 Pallet Jack符合ISO 3691-4安全标准,提供360 度全方位安全覆盖。它能检测并避开障碍物 直至机器人的整个高度。 |
||
|
信号灯
MiR1200 Pallet Jack 使用信号灯向周围的工作人员指示其动作。这让周围的人很容易了解机器人的方向和活动。 |
||
|
电池容量
MiR1200 Pallet Jack 具有高电池容量和快速充电能力,可确保全天候工作流程中的无缝操作。 |
||
|
易于使用
MiR1200 Pallet Jack 配备了 MiR 的最新软件。它可与MiR Fleet 及其他 MiR 机器人无缝集成。 |
| 实现提高效率 | 获得快速吞吐量 | 提高工作场所的安全性 | 优化您的整个价值链 | 全天候运行工作流程 | ||||
| 最多可自动移动 1200 千克托盘 | 基于人工智能的托盘感知技术,可快速检测托盘 | 用安全的 AMR 托盘搬运车取代手动叉车 | 使用 MiR 的各种 AMR,所有 AMR 均由 MiR Fleet 控制 | 得益于快速充电和高电池容量 |
| 指定用途 | 自主移动机器人(AMR)用于自动无人驾驶重载运输 | 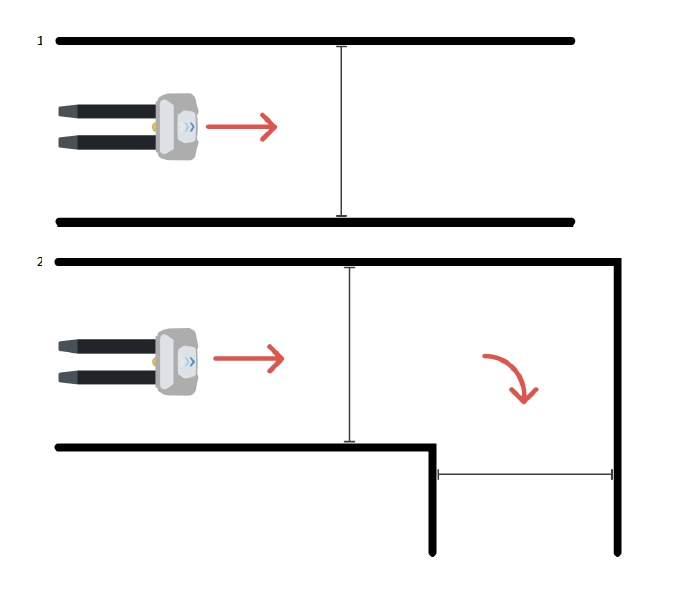 |
| 类型 | 自主移动机器人(AMR) | |
| 颜色 | RAL 7011 / 铁灰色 | |
| 产品设计寿命 | 5年或20000小时的现役工作,以先到者为准 | |
| 长度 | 1934 毫米 / 76.14 英寸 | |
| 宽度 | 800毫米 / 31.5英寸 | |
| 高度 | 2130 毫米 / 83.86 英寸 | |
| 重量 | 810 公斤 / 1786 磅 | |
| 最大提升速度 | 1140 毫米 / 44.9 英寸 | |
| 最大有效载荷 | 1200 公斤 / 2646磅 | |
| 最大速度(在平坦表面上最大有效载荷) | 1.5米/秒(5.4公里/小时)|4.9英尺/秒(3.6英里每小时) | |
| 机器人发出的最大噪声 | 77.3 分贝 | |
| 拾取和放置托盘的时间 |
从入口位置开始:最多40秒的取货时间和最多30秒的放货时间 从右或左进入位置:最多55秒提货时间和最多50秒下车时间 |
 |
| 空间要求:操作走廊宽度 ¹ |
全速:2350毫米 / 92.5 英寸 在减速时:1600毫米 / 63英寸 |
|
| 空间要求:90°转弯的操作走廊宽度 ² | 2000 毫米 / 78.7 英寸 | |
| 空间要求:U型转弯的操作走廊宽度 ³ |
无托盘:1950毫米 / 76.8英寸 带托盘:2050毫米 / 80.7英寸 |
|
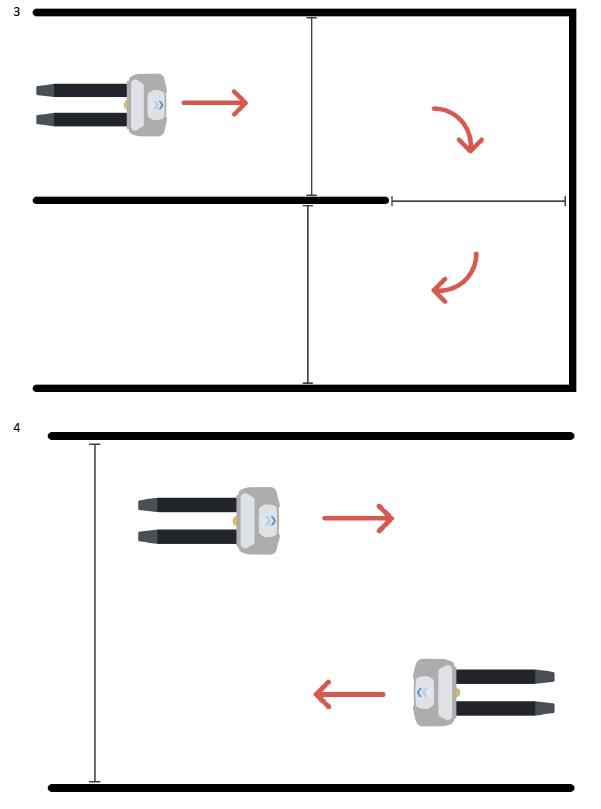
| 空间要求:两个机器人通过的操作走廊宽度 ⁴ |
在最大速度:4700毫米 / 185.1英寸 在减速时:3200毫米 / 126英寸 |
|
| 电池类型 | 锂离子电池,3节 | |
| 电池重量 | 11 公斤 / 24.3 磅(每个电池) | |
| 电池电压 | 48V标准电压 | |
| 最大有效载荷下的工作时间 | 长达10小时 | |
| 环境 | 仅限室内使用 | |
| 环境温度范围,操作 | 5-25 / 4-77°F,4°C / 104°F最长1小时 | |
| 湿度 | 20-95% 无冷凝 | |
| IP等级 | 防护等级 52 | |
| 地面到轮子的摩擦系数 | 最小 0.60 | |
| 安全认证 |
EN ISO 12100:2010, ISO 13849-1:2023, EN ISO 13850:2015, EN ISO 3691-4:2023, EN IEC 61000-6-4:2007/A1:2011, EN IEC 61000-6-2:2005/AC:2005, EN 12895:2015+A1:2019 |
|
| 传感器:SICK安全激光扫描仪 | 3件(前后),在机器人周围提供360°视觉保护 | |
| 传感器:3D 相机 | 5件,用于托盘和障碍物检测 | |
| 传感器:3D 激光雷达 | 1件,在机器人顶部 | |
| 传感器:超声波传感器 | 1件,用于检测托盘是否牢固地放置在叉子上 |
Copyright © 2008-2021 太阳集团tyc5997有限公司 All Rights Reserved 津ICP备18001001号-1
 津公网安备 12011202000591号
津公网安备 12011202000591号
太阳集团tyc5997有限公司致力于工业自动化解决方案的研发,结合机器人、机器视觉、运动控制、NI数据采集、多平台软件和物联网系统集成开发。主营:robotiq、mir机器人、ur机器人、机器人末端、协作机器人、移动机器人
