
 |
高节拍车身定位系统 AT-S1000-03D 通过对车身特征进行扫描及图像处理,获取车身实时空间位姿偏移量,引导机器人实现轨迹补偿。通过更灵活的3D视觉处理手段,确保下游机器人执行喷漆、涂胶、焊接等工艺步骤的准确性,实现从自动化向柔性化的制造升级。
|
|
间隙面差检测系统 AT-S1000-05B 全自动机器人3D视觉间隙、面差检测系统,通过将大量繁琐的点位检测工作编程化、从而归类为机器人的重复性工作,实现汽车产线检测效率的提升,降低人力成本,有效应对订单化、多型号混线生产提出的柔性要求。
|
 |
 |
 |
为生产导入“柔性化”车身定位方案 | |||
|
|
传统机械式定位无法经济、高效解决多种车型共线生产问题。
|
|
生产品质依赖高精度夹具,夹具定制、存放、保养成本高,工位投资极大。
|
您是否还在依赖高精度夹具以保障升降辊床落位精度,或通过编码尺实现较高的雪橇/台车到位精度?是否还在增加更多新型号工装及频繁调整喷涂设备来适应不断新增的车型?那么,是时候引入更灵活的3D视觉解决方案了!
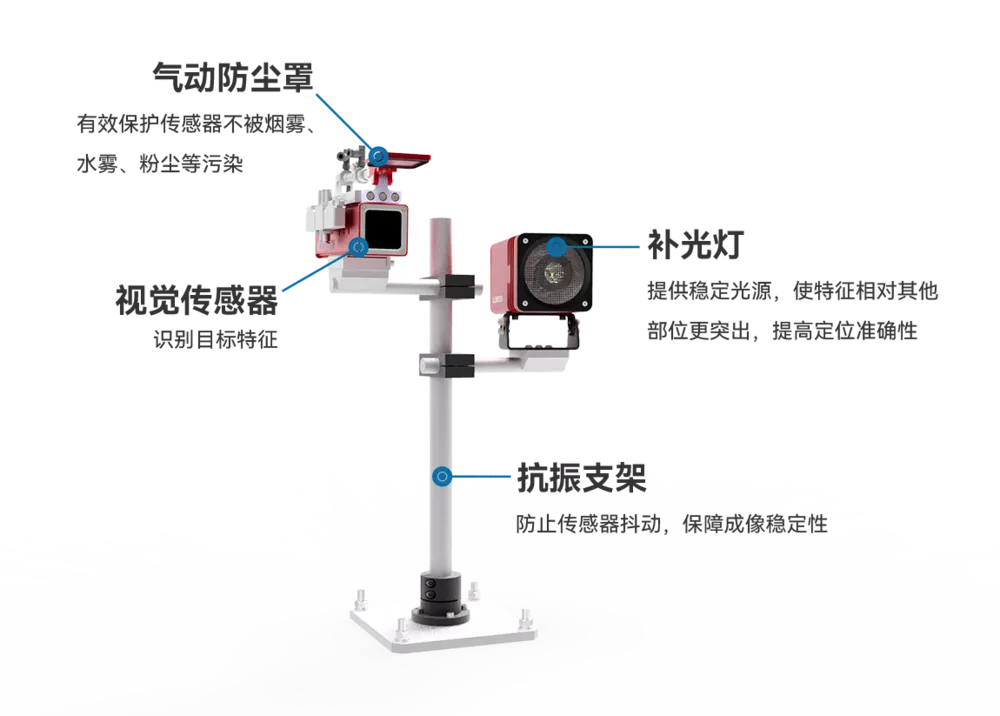
埃尔森汽车车身定位系统AT-S1000-03D是一套通过部署多组视觉传感器、对车身特征进行扫描及图像处理,以获取车身实时空间位姿偏移量,引导机器人实现轨迹补偿的3D视觉产品。通过更灵活的3D视觉处理手段,确保下游机器人执行喷漆、涂胶、焊接等工艺步骤的准确性,实现从自动化向柔性化的制造升级。
|
|
 |
 |
||||
|
|
人工调整自动化程度低,工作量大,易失误而产生机器人、喷头、焊枪等工具碰撞风险。
|
|
通过夹具定位、夹具切换及人工干预均会带来生产节拍损失。
|
 |
埃尔森AT-S1000-03D 产品特性 | ||||
|
特征定位
|
非接触式
|
||||
|
|
通过多个传感器组合,从不同方向定位车身特定特征(如圆孔、方孔等)。
|
|
非接触在线定位系统,无需定制昂贵的接触式夹具,降低工位建设投入成本。
|
||
|
易于部署
|
灵活配置
|
||||
|
|
标准化、模块化产品组,为用户提供最合适的零件搭配,减少现场安装部署耗时。
|
|
可根据实际工况、灵活调配系统参数及安装距离等,实现最佳视觉纠偏效果。
|
||
| 埃尔森AT-S1000-03D软件支持 |  |
|
|
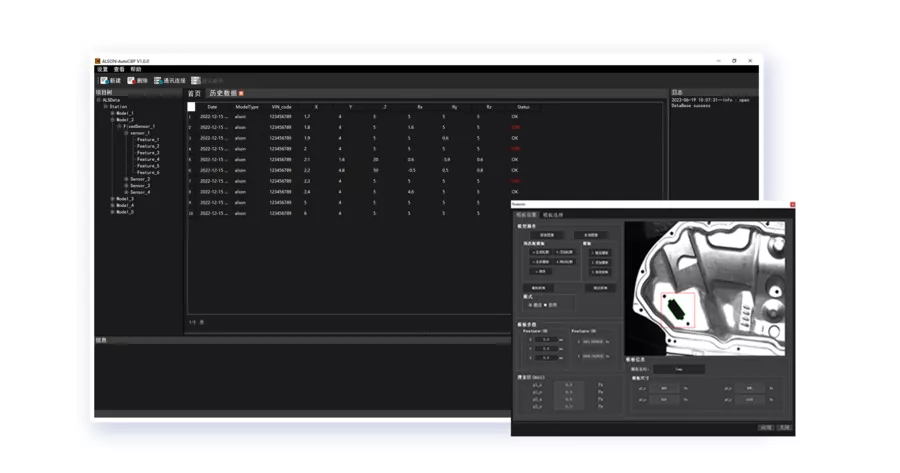
- 数据结构化管理,可灵活添加多个车辆型号、特征模版、传感器等信息
- 操作界面直观简洁,定位过程实时在线显示,非专业编程人员亦可快速掌握调测方法
|
||
|
- 车辆标识符与车型、日期、定位结果绑定,可快速追溯、锁定待分析车辆,方便快速查找、分析误差原因
- 支持共线生产,应对小批量、多品类生产模式,灵活换产,实现高度柔性化制造
|
 |
|
AT-S1000-03D 产品参数
| 视野范围(mm) | 700×600~1252×1058 | ||
| 工作距离(mm) | 1000~5000 | ||
| 定位精度(mm) | ±1 | ||
| 定位节拍(s) | <1.5 | ||
| 接口(工控机端) |
RJ45 |
||
| 输出结果 | 位置偏移量XY,Z,Rx,Ry,Rz | ||
| 工作温度(℃) | 0~50 | ||
| 存储温度(℃) | -20~70 | ||
| 湿度 | 20%~90%RH无凝结 | ||
| 防护等级 | IP65 | ||
| 电源输入 | DC 24V 3A | ||
| 典型功率(Typica,Wl) | 4.5 | ||
| 最大功率(Max,W) | 40 | ||
| 适用车间 | 焊装车间、涂装车间 | ||
| 配套软件 | 调试软件ALSON-AutoCBP | ||
1、以上参数针对单组产品,本系统标准采购方案为4组/套。
2、本系统允许车身最大到位偏差;车辆前进方向±50mm, 偏转角度±5°,超出此偏差或将影响定位有效性。
通讯支持
埃尔森3D视觉系统支持市场主流机械臂品牌及PLC品牌,可实现TCP、UDP、MODBUSTCP、PROFINET、MOTOPLUS等多种通讯方式

Copyright © 2008-2021 太阳集团tyc5997有限公司 All Rights Reserved 津ICP备18001001号-1
 津公网安备 12011202000591号
津公网安备 12011202000591号
太阳集团tyc5997有限公司致力于工业自动化解决方案的研发,结合机器人、机器视觉、运动控制、NI数据采集、多平台软件和物联网系统集成开发。主营:robotiq、mir机器人、ur机器人、机器人末端、协作机器人、移动机器人
